红外与激光工程
2023, 52(11): 20230134
1 中国科学院半导体研究所光电系统实验室, 北京 100083
2 中国科学院大学材料与光电研究中心, 北京 100049
针对光栅结构光系统测量误差对拟合结果的影响,提出了一种基于测量环境的误差确定方法。统计不同光源环境及测量距离下的高度测量误差,利用参数或非参数拟合获取其概率密度函数,将上述误差连同平面测量误差一起添加至理想平面模型,通过最小二乘法仿真计算出模型的法向量及定点坐标。实验结果表明:该方法得到的模型参数与根据真实测量数据计算得到的数值基本一致,法向及定点误差分别低于0.001 rad和0.233 mm;所提方法能有效解决光栅结构光系统在不同环境下测量结果精确度不高的问题,此外还能应对实际点云因数据缺失等因素而难以实现高精度拟合的情况,为后续误差校正提供依据。
测量 光栅结构光 测量误差 概率分布 模型拟合 最小二乘法
1 中国科学院半导体研究所光电系统实验室, 北京 100083
2 中国科学院大学材料与光电研究中心, 北京 100049
针对大视场下气瓶阀门的自动化操作,提出一种基于对称性投影的三维定位算法。采用级联分类器对阀门进行初定位与分割,通过随机采样一致性(RANSAC)算法提取阀门平面法向,利用规则刚体结构的对称性,以一种轴向投影与自适应阈值相结合的方式获取阀门平面的边缘点对,并结合空间直线方程计算出最终所需的中心坐标,实验结果表明:在690 mm×520 mm的视场范围内,坐标及位姿的均方根误差分别为0.352 mm,0.0145 rad。与常规边缘提取方式相比,该算法能更好地应对噪声与点云的缺失,实现了大视场下阀门中心的精确定位。
机器视觉 三维目标 随机采样一致性算法 图像处理 高精度定位 光学学报
2020, 40(10): 1015001
Author Affiliations
Abstract
1 Optoelectronics System Laboratory, Institute of Semiconductors, Chinese Academy of Sciences, Beijing 100083, China
2 University of Chinese Academy of Sciences, Beijing 100049, China
3 School of Electronic, Electrical and Communication Engineering, University of Chinese Academy of Sciences, Beijing 100049, China
4 College of Materials Science and Opto-Electronic Technology, University of Chinese Academy of Sciences, Beijing 100049, China
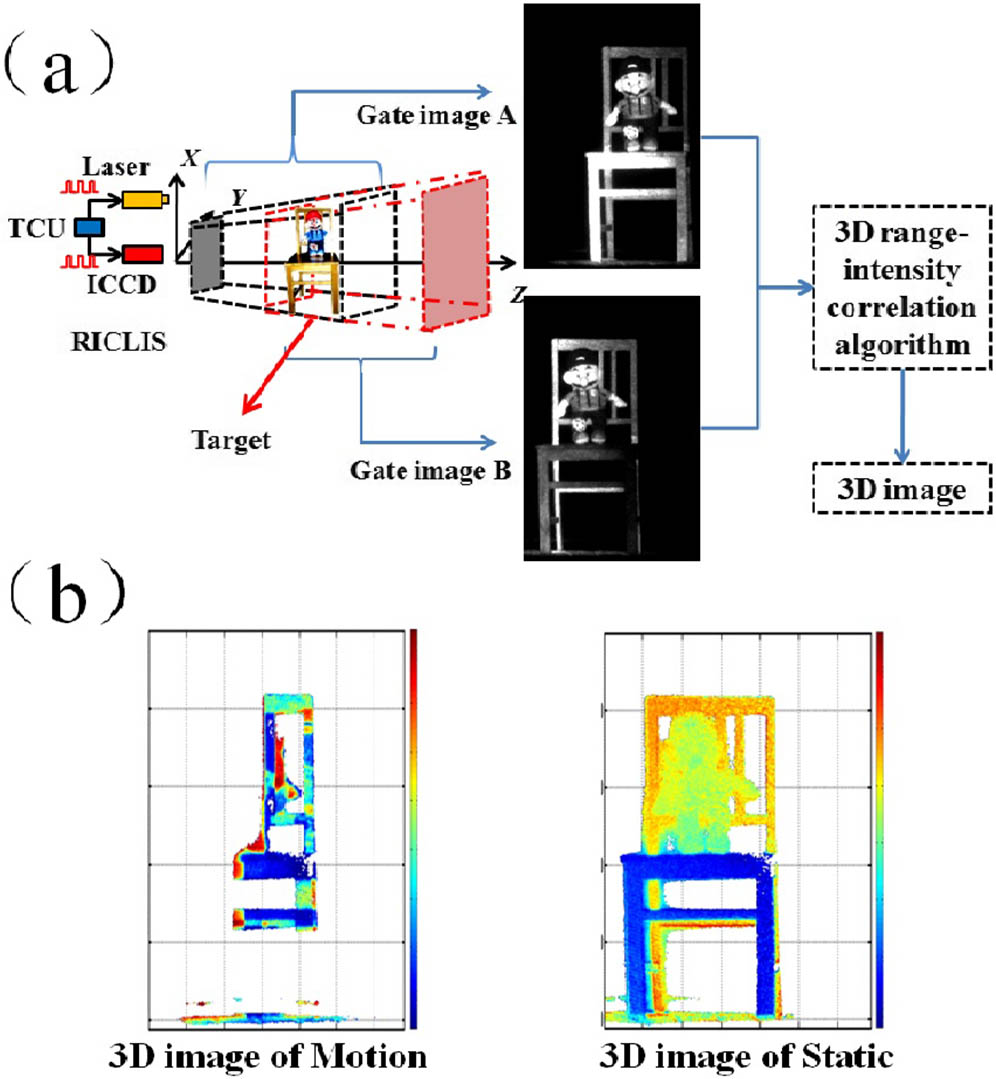
This Letter proposes a coordinate difference homogenization matching method to solve motion influence in three-dimensional (3D) range-intensity correlation laser imaging. Firstly, features and feature pairs of gate images are obtained by speeded-up robust figures and bi-directional feature matching methods. The original mean value of the feature-pair coordinate differences is calculated. Comparing the coordinate differences with the original mean value, the wrong feature pairs are removed, and then an optimized mean value is updated. The final feature-pair coordinates are re-registered based on the updated mean value. Thus, an accurate transformation is established to rectify motion gate images for 3D reconstruction. In the experiment, a 3D image of a tower at 780 m is successfully captured by our laser gated imaging system on a pan–tilt device.
280.0280 Remote sensing and sensors Chinese Optics Letters
2017, 15(10): 102802
中国科学院福建物质结构研究所, 福建 福州 350001
为更适用于批量生产激光投影仪, 需要一种具有结构紧凑、性能稳定与低成本等特点的绿色激光器作为绿光光源。采用光胶合的Nd:YVO4/PPMgOLN晶体棒作为增益介质和倍频晶体, 结合一种新型焊接封装工艺, 最终得到了一种紧凑型微片阵列激光器。该激光器3个激光光束共得到了223.7 mW的功率输出, 每个激光光束都有良好的光斑分布和稳定性, 且激光器包含两个内置TEC在内具有47 mm×35 mm×25 mm的紧凑尺寸。激光器连续工作2.5 h波动小于±2.5%。各项性能可以充分满足激光投影仪绿光光源的要求, 并便于低成本批量生产与后期维护。
微片阵列激光器 掺杂氧化镁的周期极化铌酸锂 绿色激光器 激光显示 microchip laser array PPMgOLN green laser laser display 红外与激光工程
2017, 46(6): 0605003
Author Affiliations
Abstract
Optoelectronics System Laboratory, Institute of Semiconductors, Chinese Academy of Sciences, Beijing 100083, China
This Letter proposes a high bit-depth coding method to improve depth map resolution and render it suitable to human-eye observation in 3D range-intensity correlation laser imaging. In this method, a high bit-depth CCD camera with a nanosecond-scaled gated intensifier is used as an image sensor; subsequently two high bit-depth gate images with specific range-intensity profiles are obtained to establish the gray depth map and finally the gray depth map is encoded by an equidensity pseudocolor. With this method, a color depth map is generated with higher range resolution. In our experimental work, the range resolution of the depth map is improved by a factor of 1.67.
110.6880 Three-dimensional image acquisition 110.0110 Imaging systems Chinese Optics Letters
2015, 13(7): 071102
Author Affiliations
Abstract
Optoelectronics Systems Laboratory, Institute of Semiconductors, Chinese Academy of Sciences, Beijing 100083, China
We present a method of time coding with ABAB synchronization timing control for real-time 3D super-resolution range-gated imaging (3DSRGI). To meet the high precision of time delay and pulse width in ABAB synchronization time sequencing, phase shift is implemented to achieve ns-scaled delay and width accuracy without restoring to high clock frequencies. Theoretical analysis and experiments prove that 1 ns delay and width precision is obtained by our timing control unit based on a single field-programmable gate array with 5 ns clock cycle. Finally, a prototype experiment of 3DSRGI is demonstrated at a 10 Hz video rate with 696 pixels×520 pixels.
110.6880 Three-dimensional image acquisition 150.6910 Three-dimensional sensing Chinese Optics Letters
2015, 13(8): 081102
中国科学院半导体研究所光电系统实验室, 北京 100083
介绍了一种用于荧光寿命图像数据分析的高精度列文伯格-马克夸特(LM)迭代算法。该算法的性能经过标准荧光寿命试剂以及生物图像的算法验证。该算法适用于不同的荧光衰减模型,相对于普通的非线性最小二乘估计方法具有更高的精度。结果表明,列文伯格-马克夸特算法是一种高精度、适用性广的荧光寿命图像计算方法,可以满足生物学、生物化学、生物物理学、医学诊断等实际应用的需求。
成像系统 列文伯格-马克夸特 非线性最小二乘优化方法 门控荧光寿命成像系统 荧光寿命图像 激光与光电子学进展
2015, 52(10): 101102
1 中国科学院半导体研究所 光电系统实验室, 北京 100083
2 北京市微技术研究所, 北京 100102
搭建了室内可见光定位系统, 实验上探索了接收信号强度比定位算法的可行性。通过控制多个LED光源在不同时隙的亮暗, 分别传输直流与正弦信号, 使用照度计及光电探测器测试接收信号强度, 对接收机位置进行了估计。其中使用直流信号时, 在与光源所在平面相距59cm的接收平面内, 得到最大误差为2.05cm、平均误差为8.64mm的定位精度; 使用正弦信号时, 在与光源平面相距30cm的接收平面内, 得到最大误差为1.09cm、平均误差为5.6mm的定位精度, 并且使用交流信号时实验结果不受环境杂散光的干扰。
室内定位 可见光 接收信号强度比算法 定位精度 indoor localization visible light LED LED received signal strength ratio algorithm location accuracy
1 中国科学院半导体研究所光电系统实验室, 北京 100083
2 中国科学院大学, 北京 100049
设计了一种大功率、小体积、可有效降低散斑的投影用二维激光光源模块。该激光光源模块由二维激光二极管(LD)阵列和微透镜阵列两部分组成,不需要其他光学器件,可直接获得均匀的矩形照明光斑。使用Zemax软件建立了具体的模型,分别分析了LD的发散角、个数、间距以及光束经透镜后发散角等参数对光能利用率、光束形状、光斑大小、光束照明位置以及光束均匀性的影响。根据理论分析设计了一种用于液晶显示器(LCD)投影系统的二维激光光源模块。
光学设计 激光光源模块 多高斯光束 半导体激光器阵列 投影显示 中国激光
2013, 40(10): 1016001









